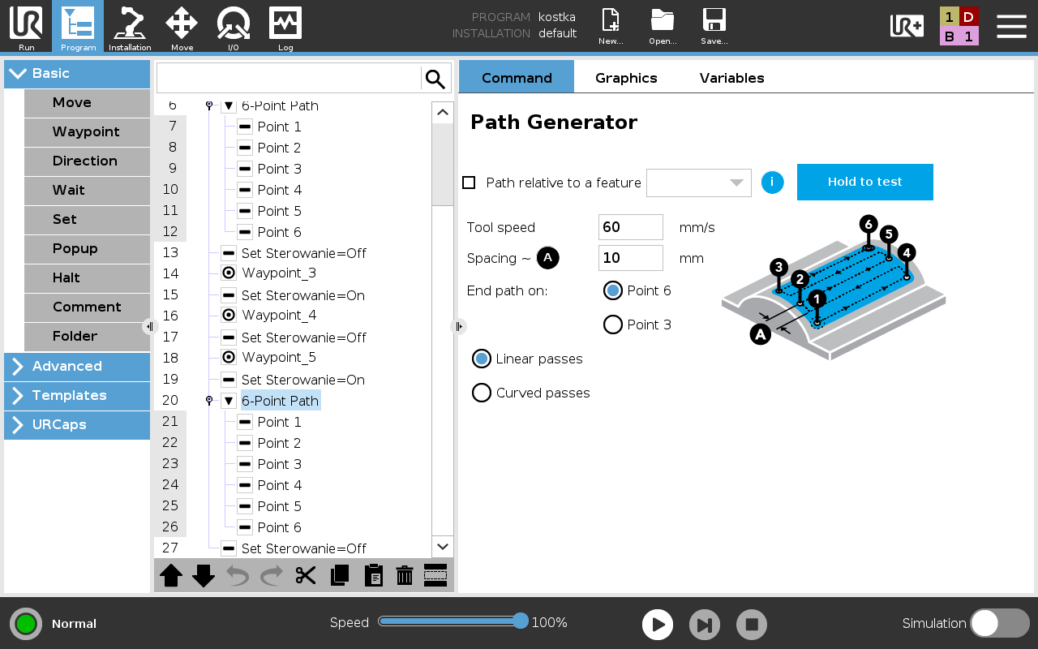
Jednym z podstawowych procesów przemysłowych jest pokrywanie powierzchni farbami czy lakierami. Z punktu widzenia jakości bardzo ważne jest utrzymanie dokładnego pokrycia całego obszaru i utrzymanie odpowiedniej grubości. Przygotowując pokazany poniżej test, skorzystaliśmy z oprogramowania copilot, wspomagającego obliczanie pozycji robota. Dzięki temu, wymagane było określenie tylko 6 punktów na każdej ze ścian.





{kind=link}