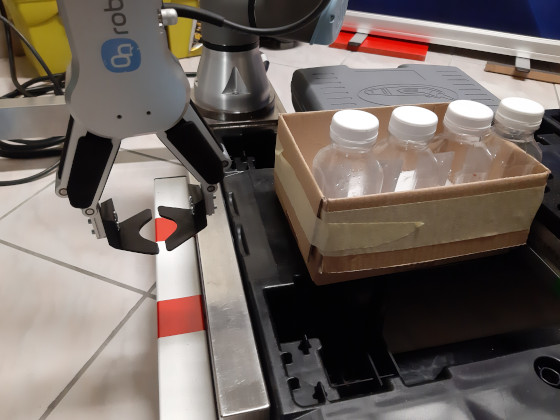
Tym razem krótki pokaz układania buteleczek do kartonika, jako przykład jednego z procesów mających miejsce w większości zakładów produkcyjnych. W wielu miejscach zachodzi konieczność zapakowania produktów do zbiorczego opakowania. Tym razem skupiliśmy się na butelkach z uwagi na ich kształt i wymóg pionowego postawienia.
Warto zwrócić uwagę także na chwytak, a raczej na jego palce, wykonane na drukarce 3D. Dzięki temu możliwe było idealne dopasowanie ich do kształtu. Układ V pozwala na pobranie butelek o różnych – oczywiście w pewnym zakresie – średnicach szyjek.






{kind=link}